“Che vinca il migliore robot” è stata una frase spesso pronunciata durante le fasi finali DARPA Robotics Challenge , tenutasi dal 5 al 6 Giugno al Fairplex a Pomona, Los Angeles. Che cos’è ? Il DARPA è la gara promossa dal Dipartimento per la Difesa degli Stati Uniti. In questa competizione si sfidano 24 squadre di del settore robotico hi-tech provenienti da USA, Giappone, Sud Corea, Germania e Italia.
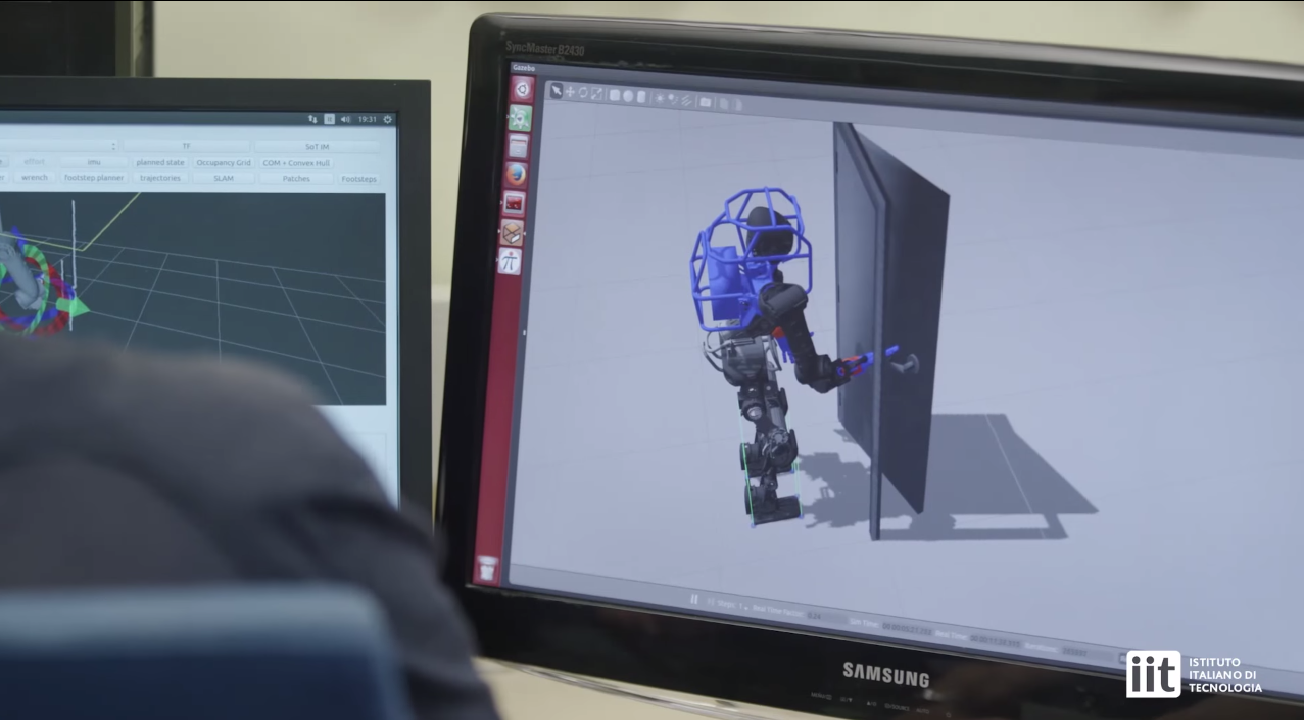
La prova si svolgerà in uno scenario ispirato all’incidente nucleare di Fukushima. Sono 8 le prove che il robot deve svolgere nell’arco di 1 ora: guidare un veicolo, aprire una porta e camminare all’interno di un edificio, chiudere una valvola o tagliare un buco nel muro, una prova a sorpresa, rimuovere ostacoli, camminare su terreno sconnesso, salire una o più scale.
Prende il primo posto con $ 2 milioni di premio in denaro il Team KAIST di Daejeon, Corea del Sud, e il robot DRC-Hubo. Il secondo posto che ha portato a casa 1 milione di dollari è stato conferito al team IHMC Robotics di Pensacola, in Florida., e al loro robot Running Man. Il terzo posto va ai, Tartan Rescue di Pittsburgh che guadagna il premio di $ 500,000, e al robot CHIMP.
Il Team IIT- Istituto Italiano di Tecnologia (guidato da Nikos Tsagarakis e composto da 27 specializzati in robotica, età media 31 anni, che curano la meccanica, il software e l’elettronica del robot umanoide italiano), ha concluso il DARPA Robotics Challenge in 17° posizione dopo aver superato le prime due prove: guida e apertura porta.
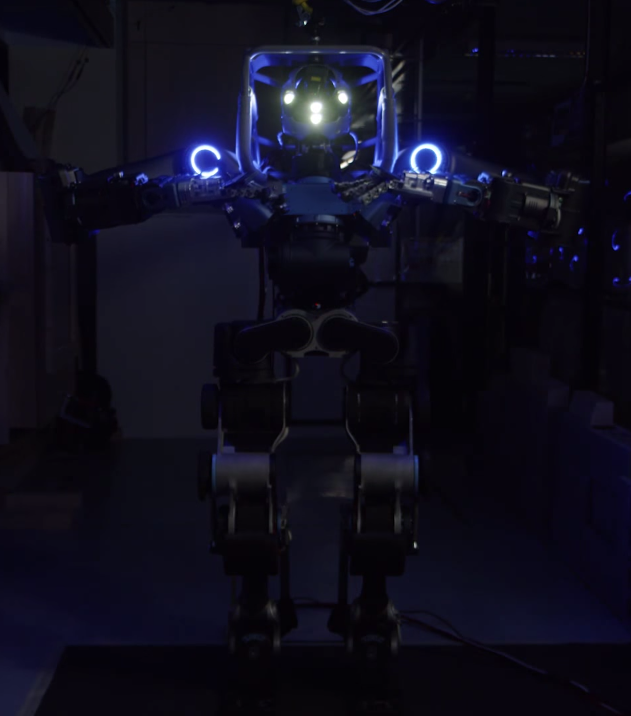
Design, motori e soft-hand sono i veri punti di forza di Walkman, il robot umanoide sviluppato dall’Istituto Italiano di Tecnologia (IIT) di Genova, in partnership con il Centro di Ricerche “E. Piaggio” di Pisa, un progetto finanziato dalla Commissione Europea dalla fine del 2013. Il robot Italiano Walkman ha dovuto interrompere la competizione per un problema di affidabilità della batteria, in dotazione standard ai team, dovuto principalmente al poco tempo a disposizione per i test, per l’integrazione con la parte robotica.
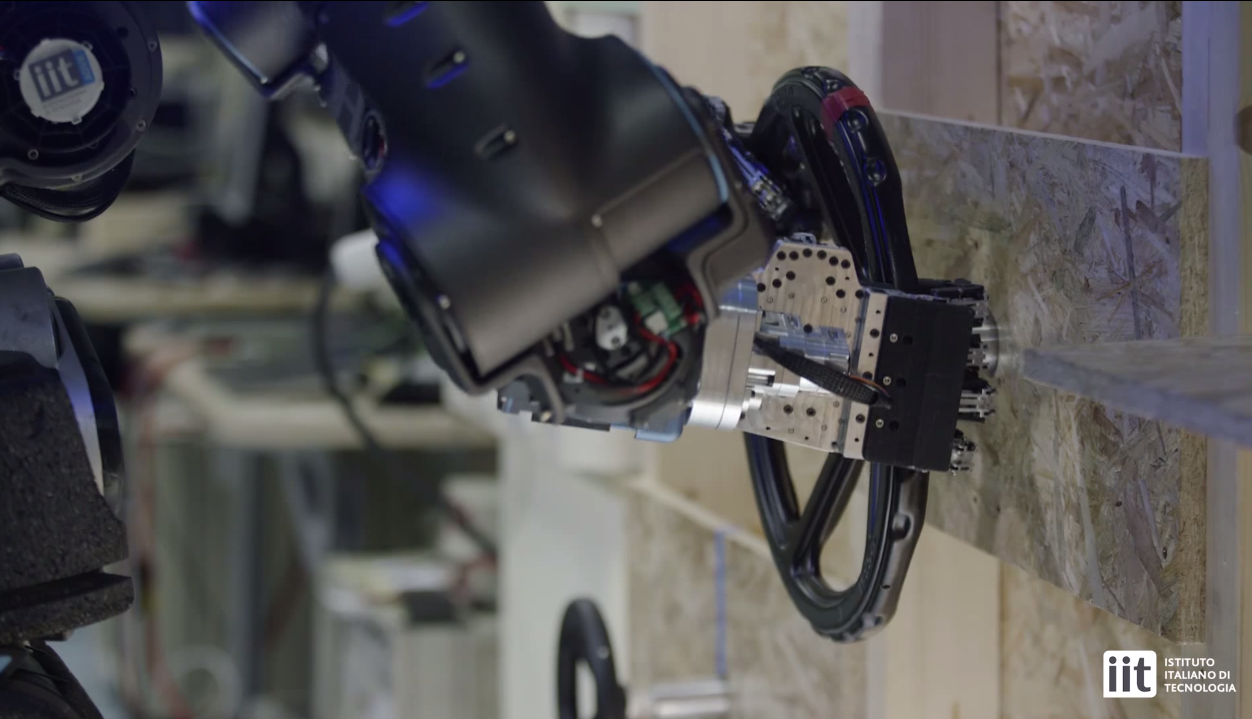
Walkman è alto 1.85 metri, 120 Kg di peso , composto per il 90 % di Ergal , titanio 8%,ferro e plastica, l’intero robot è stato costruito in 10 mesi. Il robot è capace d’intervenire in situazioni d’emergenza nelle zone degradate e pericolose del pianeta, Walkman sa guidare, ha le mani morbide simili a quelle umane ed è capace di afferrare utensili da lavoro come il trapano.
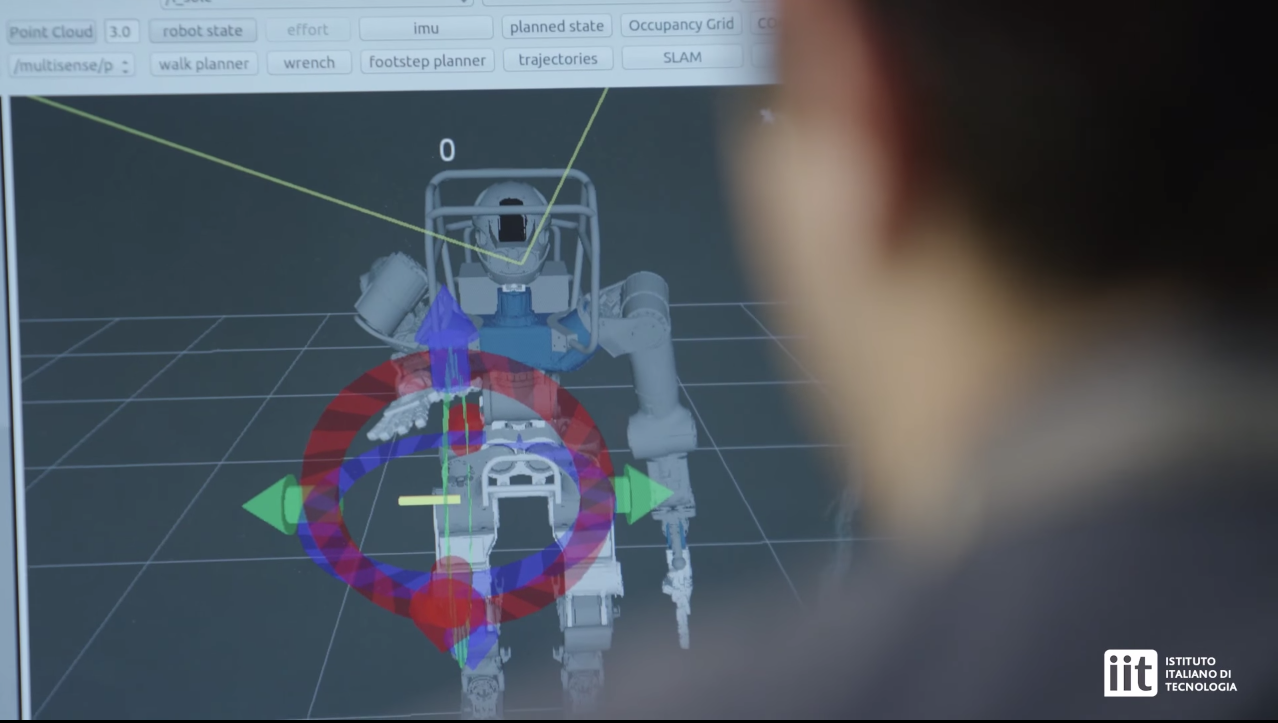
Sulla schiena è alloggiata una batteria di 2 KWh che permette al robot di compiere attività con autonomia di almeno 2 ore. Nella testa si trovano delle telecamere e uno scanner laser tridimensionale. Il movimento del corpo di WALK-MAN è gestito da circa 40 schede di controllo, 4 sensori di coppia di forza (2 nelle caviglie e 2 nei polsi), 33 motori che uniscono i vari giunti e 2 accelerometri per regolare l’equilibrio. Due computer (con processore INTEL i7 quadcore) controllano la visione e la percezione e il movimento. L’architettura software si basa su piattaforma YARP (codice sviluppato da IIT per l’umanoide iCub), con integrazioni di ROS e Gazebo. I motori di WALK-MAN brevettati dalla IIT integrano in un unico modulo “click-on” sensori di coppia, forza e posizione. La loro potenza è di 2.8 KW, equivalente a due moto da strada, e del tutto paragonabile alla potenza che sprigiona il robot Atlas, il robot idraulico sviluppato dallo stesso DARPA. I giunti delle gambe di WALK-MAN possono raggiungere una forza di torsione di 250Nm e velocità di rotazione di 11-12 radianti/secondo. Altra particolarità del robot è il busto ruotabile di 180 gradi e le braccia retrovertibili, questo permette a WALK-MAN di sollevarsi da terra nell’eventualità di una caduta.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}